AUTONOMOUS ROVER
Having a soft spot for robotics, I wanted to build a little land based rover. The main goal is to have this vehicle reliably follow me around the house, and possibly outdoors. My thought was that if I could reliably get this vehicle to recognize and follow me, the platform could be moved to a larger frame in order to assist the physically handicapped. For example to help a handicapped student carry his or her books and materials around, or possibly to help the elderly shop without the limitations of a small basket.
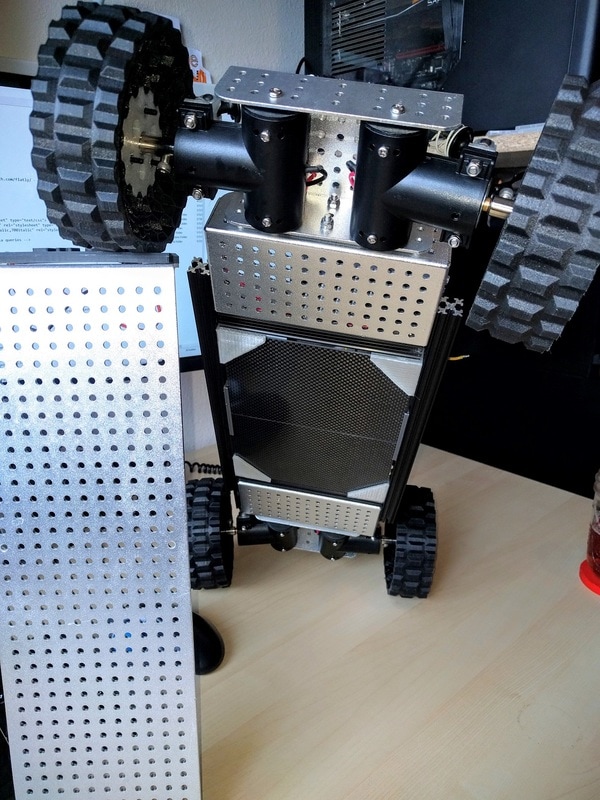
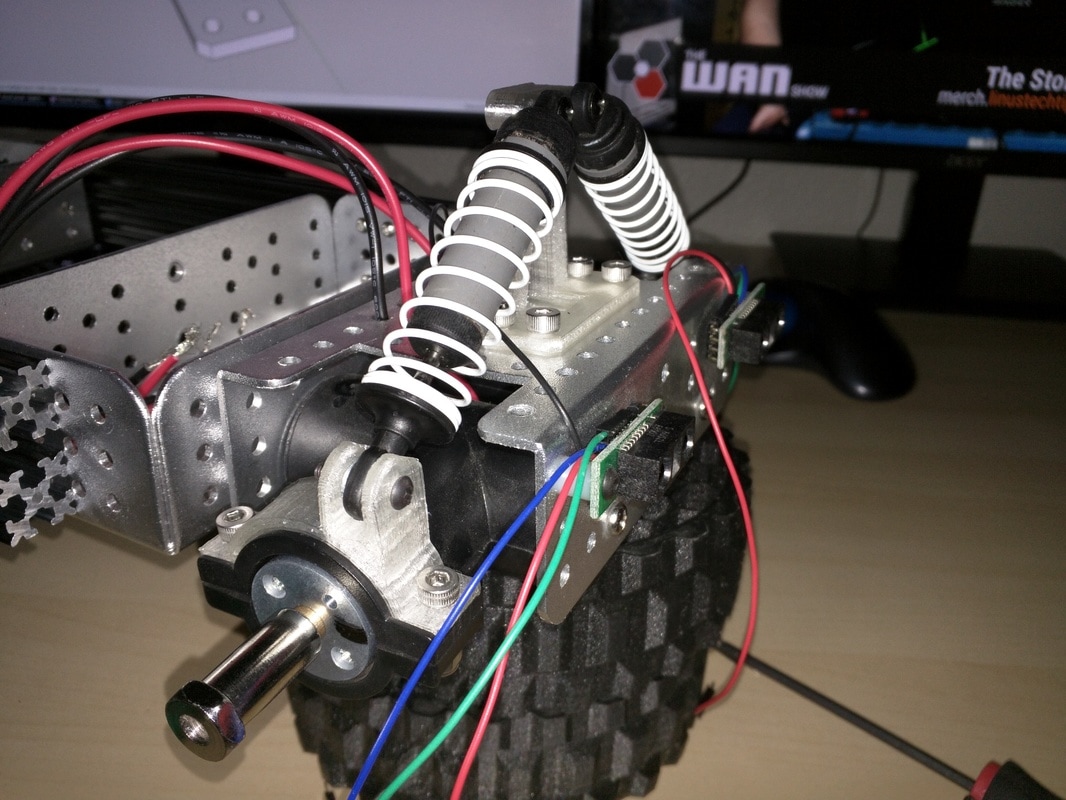
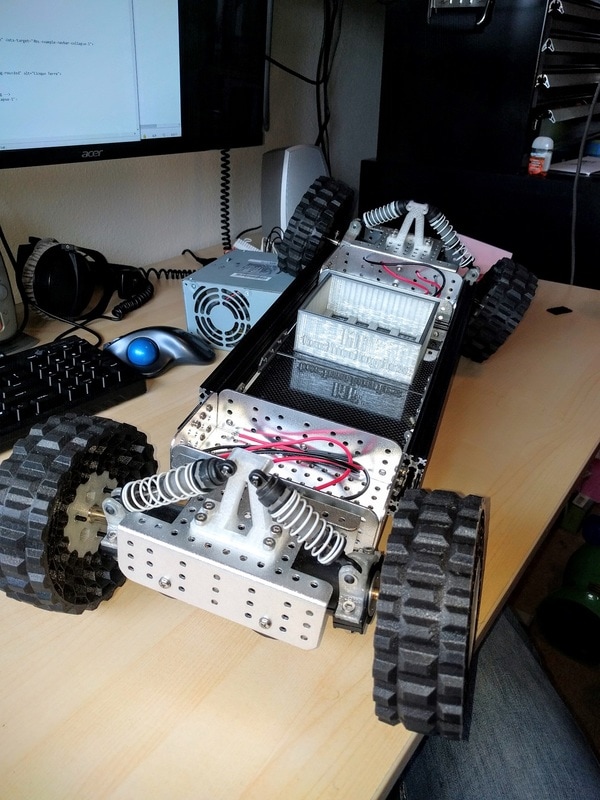
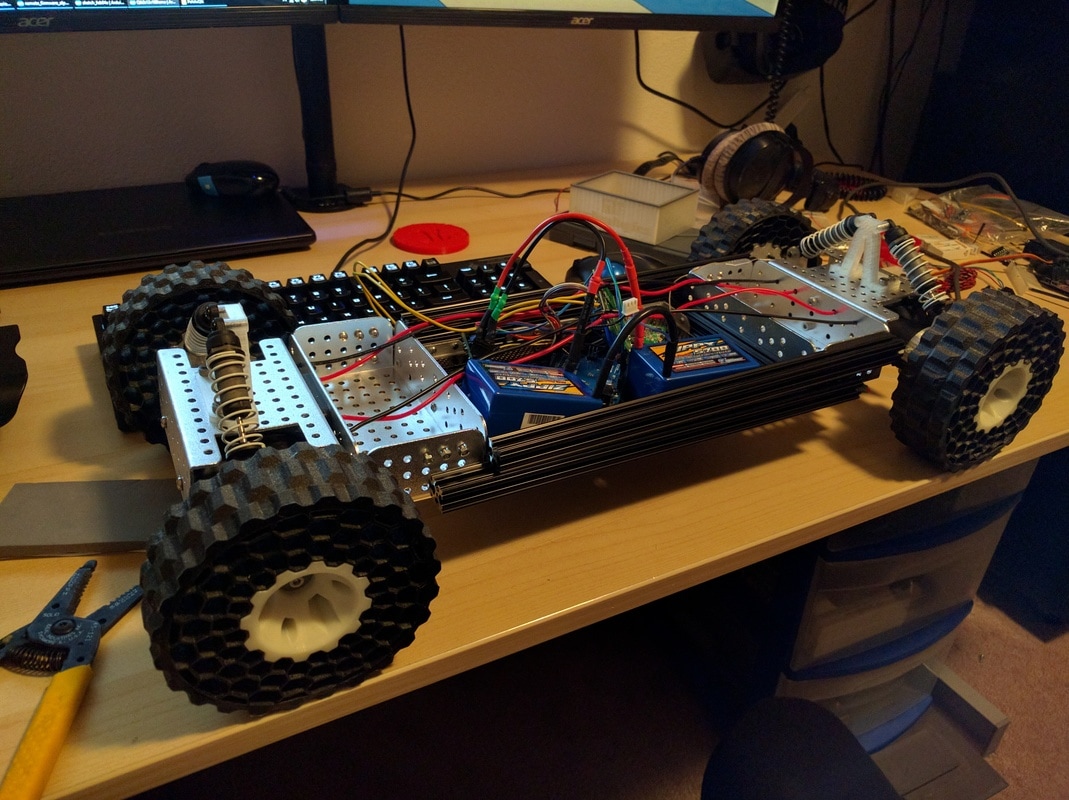
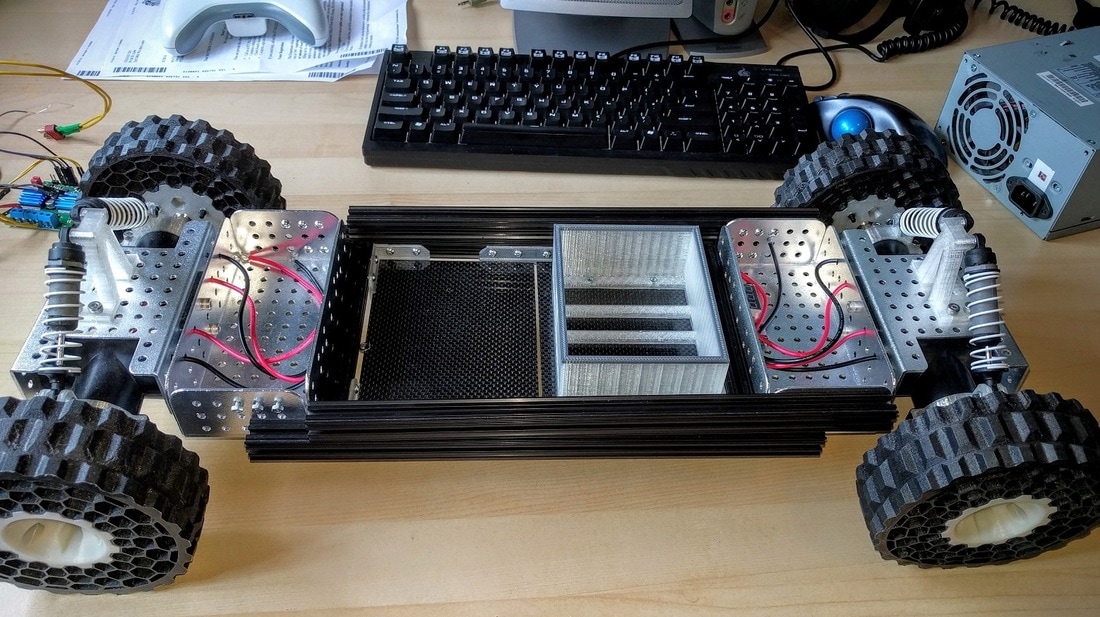
I already have access to a wheelchair that has been reverse engineered to drive serially (currently hooked up over bluetooth to an Arduino joystick, and can be seen below). The smaller frame seen in the photos was designed in the 3D modelling software Sketchup and then the plastic parts were 3D-printed and assembled
I already have access to a wheelchair that has been reverse engineered to drive serially (currently hooked up over bluetooth to an Arduino joystick, and can be seen below). The smaller frame seen in the photos was designed in the 3D modelling software Sketchup and then the plastic parts were 3D-printed and assembled